
About
Experience
M.S. Student & Researcher @ Tongji University
Embodied AI and AI4Science research.
Working on humanoid / legged robot learning, reinforcement learning, motion retargeting, and
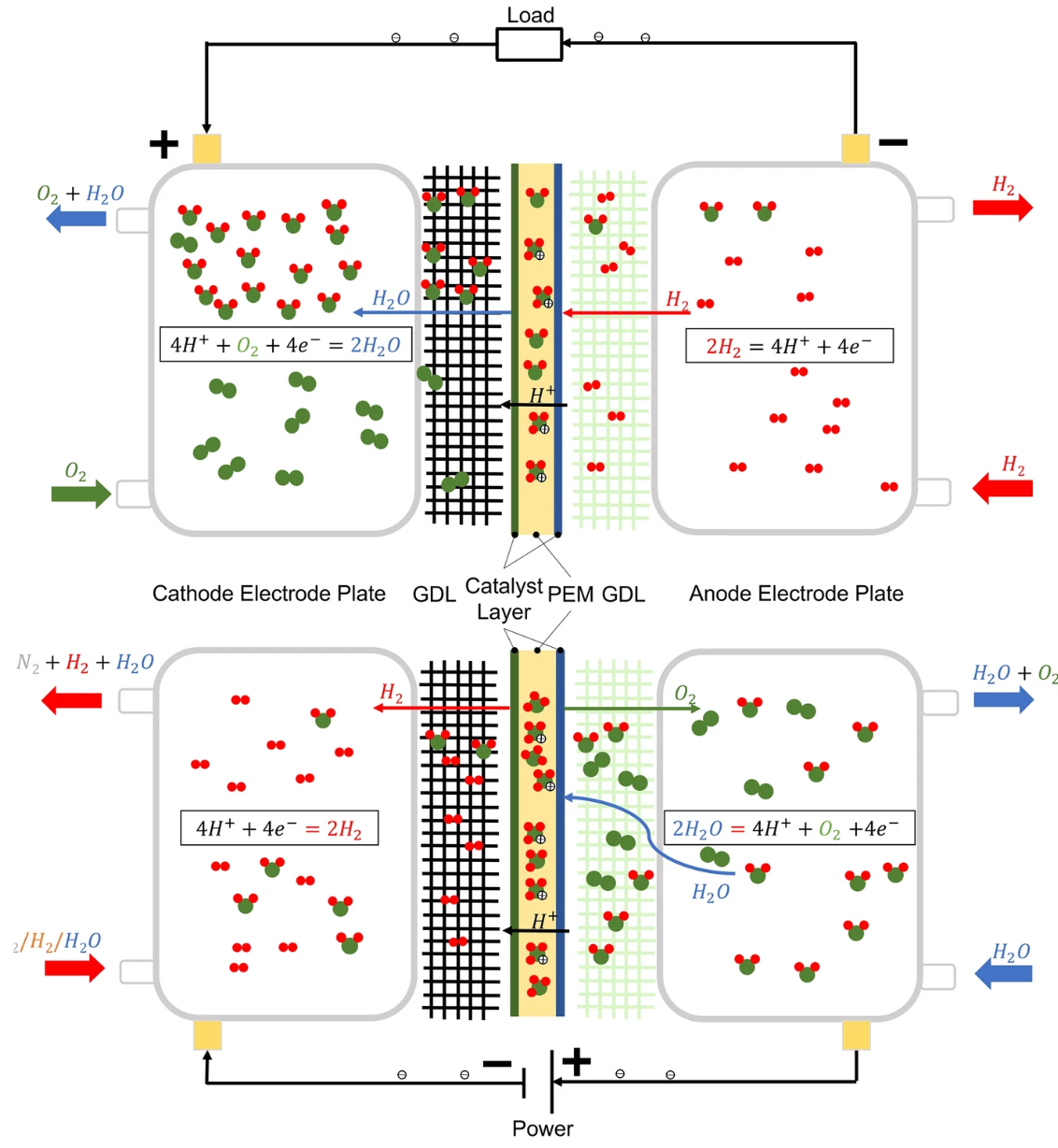
physics-informed modeling for PEM electrochemical systems.
Supervisors: Xuezhe Wei, Jiangong Zhu, Xiaoping Wu
Supervisors: Xuezhe Wei, Jiangong Zhu, Xiaoping Wu
Robotics Locomotion & Manipulation Algorithm Intern @ AgiBot, Shenzhen, China
Project: Whole-body Loco-manipulation (Sim2Real)
• Debugged AIMRT–ROS SDK communication for full-stack HW/SW integration.
• Developed dynamics-constrained motions with Crocoddyl + Pinocchio for dataset expansion.
• Built VR teleoperation whole-body controller and validated Sim2Sim / Sim2Real transfer.
Instructor: Shaohe Du
• Developed dynamics-constrained motions with Crocoddyl + Pinocchio for dataset expansion.
• Built VR teleoperation whole-body controller and validated Sim2Sim / Sim2Real transfer.
Instructor: Shaohe Du
Embodied Locomotion Control Algorithm Intern @ Xiaomi Robotics, Beijing, China
Project: Biped Locomotion with Toe Modeling
• Investigated the role of toe DoF in biped locomotion and gait stability using Cassie-style
simulation.
• Built motion data processing and visualization pipeline for RL-ready trajectories from retargeted mocap data.
• Integrated AMP imitation learning in Legged Gym and trained PPO locomotion policies in Isaac Gym.
• Optimized rewards, contact forces, and PPO hyperparameters for locomotion stability.
Instructor: Jianhua Feng
• Built motion data processing and visualization pipeline for RL-ready trajectories from retargeted mocap data.
• Integrated AMP imitation learning in Legged Gym and trained PPO locomotion policies in Isaac Gym.
• Optimized rewards, contact forces, and PPO hyperparameters for locomotion stability.
Instructor: Jianhua Feng
Embodied Perception Algorithm Intern @ Anker Innovations, Shanghai, China
Project: 3D Simulation Asset Generation & Multi-engine Survey
• Surveyed Gazebo, MuJoCo, Isaac Sim, Unreal, Unity, ROS2/LCM, and 3D/4D Gaussian Splatting
pipelines.
• Implemented ROS2 control interfaces in Isaac Sim for robot arm command and sensor streaming.
• Built an end-to-end pipeline from image capture to 3DGS reconstruction and simulation scene generation.
Instructor: Minyi Chen
• Implemented ROS2 control interfaces in Isaac Sim for robot arm command and sensor streaming.
• Built an end-to-end pipeline from image capture to 3DGS reconstruction and simulation scene generation.
Instructor: Minyi Chen
ADAS Functional Test & Automation Intern @ NIO, Shanghai, China
Project: Automated Testing for Production ADAS
• Deployed WorldSim and communication modules on Ubuntu for automated ADAS testing.
• Authored regulatory scenario test cases covering AEB, BSD/LCA, ACC, ALC, and parking features.
• Developed automation scripts for scenario execution, result collection, and report generation.
Instructor: Xinghai Huang
• Authored regulatory scenario test cases covering AEB, BSD/LCA, ACC, ALC, and parking features.
• Developed automation scripts for scenario execution, result collection, and report generation.
Instructor: Xinghai Huang
Data Communication Intern @ Porsche Engineering, Shanghai, China
Project: ADAS Simulation Scenarios & Communication Pipeline
• Built a dual-system CARLA + ROS co-simulation stack for cross-platform communication and
integration.
• Reconstructed real-world road segments and implemented FCW / SCW scenarios in CARLA.
• Designed a multi-node middleware pipeline from perception to decision to QT dashboard visualization.
Instructor: Mojun Qian
• Reconstructed real-world road segments and implemented FCW / SCW scenarios in CARLA.
• Designed a multi-node middleware pipeline from perception to decision to QT dashboard visualization.
Instructor: Mojun Qian
B.Eng. Student @ Tongji University
Major in Vehicle Engineering, with early research experience in hydrogen energy and fuel cell
systems.
Supervisor: Haifeng Dai
Supervisor: Haifeng Dai
Publications ( / )

Journal of Power Sources, revision / under review, 2026
Discover Applied Sciences, 2025
Selected Honors & Awards
- Second Prize, 2024 New Energy Vehicle Battery AI Fault Prediction Competition (University Group)
- National First Prize, Formula Student Electric China (“NIO Cup”)
- Third Prize, Tongji University Physics Competition